Bachelor Thesis: Collaborative Robot and Vision System
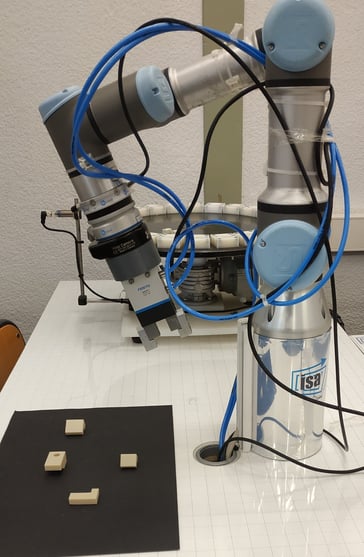
An articulated robot (3GDL rotation + 3 wrist) was chosen for its versatility. Among the articulated robots, a collaborative robot has been chosen as it is flexible, light and safe with human interaction and allows easy reconfiguration by operators.
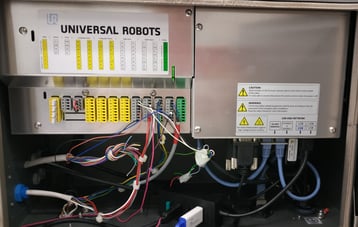
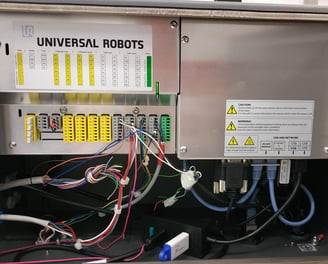
Among the different manufacturers of collaborative robots, Universal Robots (UR) stands out with a low price and without cage.
• Reduced work environments (reach < 500 mm)
• Light Tasks with high precision




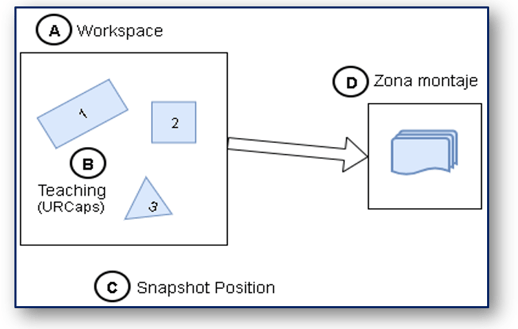
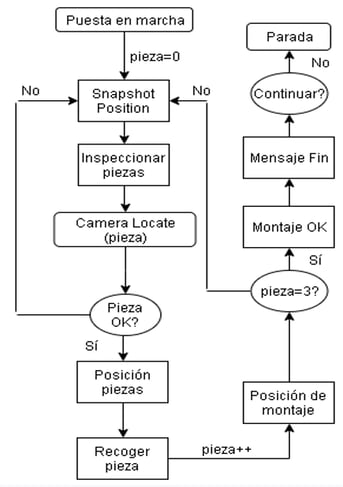
Task Sequence
CALIBRATION - Work area
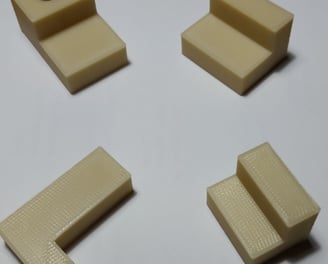
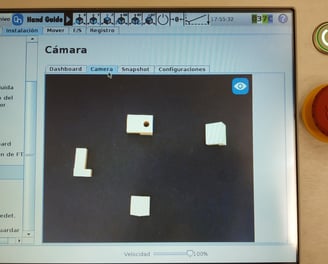
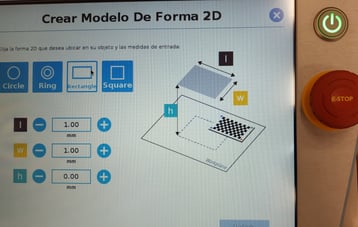
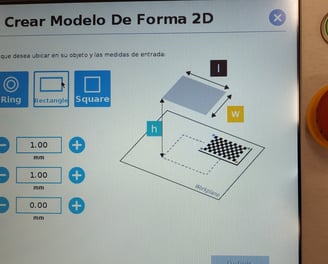
TRAINING of parts
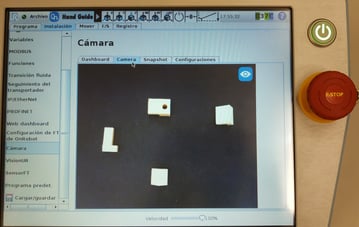
SNAPSHOT POSITION
ASSEMBLY - Assembly area
Calibration
The UR3 calibration table is used to determine the working area for the project that meets the requirements:
• B/W contrast
• Workspace perpendicular to the camera
• Landscape template (26-46 cm from the base)
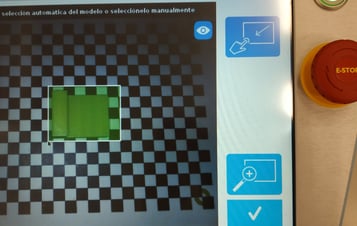
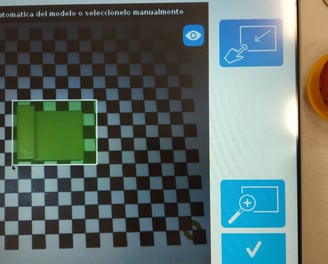
Teaching
• Landscape calibration template; and relatively close to the camera, so that the table fills the captured image space.
• The lighting should be correct to avoid poorly lit areas.
• The template should be between 26 and 46 cm from the base of the robot. Calibration template must be at the same height as the robot base.
Contact
adriandiago_97@hotmail.com